|
Risorse per il Lab. Elettronica |
|
|
Home Page
 CAD/CAE • LTspice • PSpice Sistemi • Arduino • AVR • Raspberry Pi • National Instruments Risorse • Datasheet • Link • Hardware e Software • Misc |
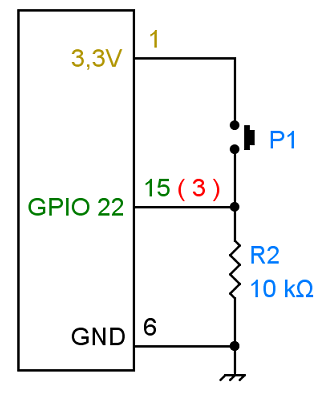
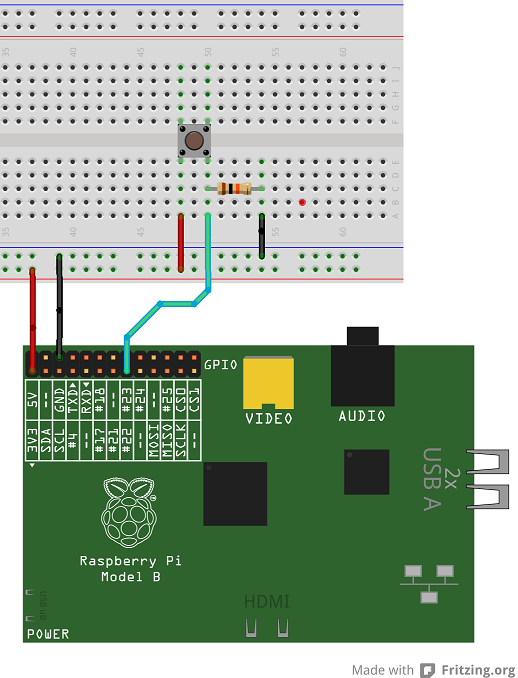
Programmare il GPIO di Raspberry Pi in C (beta)  Quest'opera è distribuita con Licenza Creative Commons Attribuzione - Non commerciale - Condividi allo stesso modo 3.0 Italia. E' dunque escluso l'utilizzo per scopi di lucro . Autore: Francesco Parisi, fparisi AT gmail DOT com Ultima modifica: 09/08/2021 Il quarto programma: contare le pressioni di un pulsante Il quarto programma, conta il numero di volte che viene premuto il pulsante e ne stampa il valore sul terminale. • L'hardware Come nel secondo esercizio, un pulsante normalmente aperto è collegato sul pin fisico 15, mediante un resistore di pull-down da 10kΩ, all'alimentazione 3.3V. Quando questo non è premuto, il livello logico applicato è 0. Premendolo si applica un livello logico 1 (3,3V).
• Il software Nella scrittura del programma, bisogna tenere conto che il pin fisico 15 corrisponde al pin virtuale 3 di WiringPi
(vedi Panoramica del GPIO)
CONTA.C
#include <stdio.h>
#include <wiringPi.h>
#define BTN_PIN 3 // Pulsante (3 WiringPi, GPIO22, pin 15)
unsigned int n; // Memorizza il numero di volte che viene premuto il pulsante
int main (void)
{
// --- Init
wiringPiSetup();
pinMode (BTN_PIN, INPUT); // configura BTN_PIN come pin di ingresso
// --- Loop
while (1)
{
if (digitalRead (BTN_PIN) == HIGH) // bottone premuto?
n++; // incrementa il numero di n
printf ("\r%d", n);
fflush(stdout);
}
return 0 ;
}
#include <stdio.h>La direttiva al preprocessore #include <stdio.h> inserisce il file header della libreria dello standard I/O del C. Si rende
necessaria perché verranno successivamente utilizzate due funzioni definite in questa libreria, la printf() e la fflush() (vedi avanti).
// --- Init pinMode (BTN_PIN, INPUT);Con la funzione pinMode() si configura il pin al quale è collegato il pulsante (BTN_PIN), come di ingresso.
unsigned int n;Il conto del numero di volte che viene premuto il pulsante va ovviamente mantenuto da una variabile, a cui possiamo dare il nome n.
if (digitalRead (BTN_PIN) == HIGH) // bottone premuto?
n++; // incrementa di uno il numero di n
Lo stato del pulsante è riconducibile alla lettura del livello logico del pin al quale questo è collegato: se il livello è 1 (HIGH)
il pulsante è premuto, se invece è 0 (LOW) il pulsante non è premuto. La funzione
digitalRead(pin) legge il livello logico del pin BTN_PIN e lo restituisce come un intero: 1 (HIGH) oppure 0 (LOW).
La struttura if...else incrementa dunque di uno la variabile n ogni qualvolta viene premuto il pulsante
printf ("\r%d", n);
fflush(stdout);
Per la corretta stampa a video della variabile n vengono utilizzate le funzioni printf() e fflush(),
contenute nella libreria I/O standard del C.
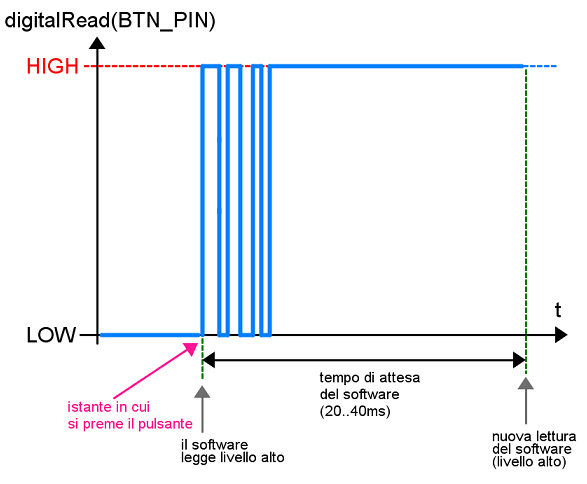
Compilando e mandando in esecuzione il programma, si nota che esso non funziona correttamente: ogni volta che si preme il bottone, il numero non aumenta di uno, ma di un numero indefinito:
Nell'impiego di interruttori, commutatori o pulsanti meccanici, si verifica quasi sempre un inconveniente che, nella maggioranza dei casi, costituisce causa di malfunzionamento nei circuiti digitali: l'elemento mobile che realizza il contatto, quando viene spostato da una posizione all'altra rimbalza (bouncing) diverse volte prima di stabilizzarsi al valore impostato.
Un possibile pseudocodice per l'anti-rimbalzo software applicato al nostro programma, potrebbe essere il seguente:
Ripeti per sempre:
Se livello del bottone = ALTO: // è stato premuto il pulsante
Aspetta 30ms // da 20 a 40ms
Se livello del bottone = ALTO: // bouncing terminato
Incrementa n di 1 // viene eseguito il codice previsto alla pressione del pulsante
Stampa n su terminale.
Fine Ripeti per sempre.
Però, anche avendo "ripulito" dai rimbalzi la pressione del pulsante, il software continua a incrementare - erroneamente - la variabile n, durante il brevissimo tempo
che l'utente mantiene ancora premuto il pulsante stesso. Ciò può essere evitato con una successiva istruzione, per esempio, che impedisca la prosecuzione del programma, finché non viene rilasciato lo stesso pulsante:
Ripeti per sempre:
Se livello del bottone = ALTO: // è stato premuto il pulsante
Aspetta 30ms // da 20 a 40ms
Se livello del bottone = ALTO: // sono terminati i rimbalzi
Incrementa n di 1 // viene eseguito il codice previsto alla pressione del pulsante
Finché livello del bottone = ALTO: // aspetta rilascio del pulsante
Itera a vuoto
Stampa n su terminale.
Fine ripeti per sempre.
Le iterazioni a vuoto del while() di attesa del rilascio pulsante, comportano un impegno della CPU, da parte del processo, vicino al 100%.
Inserendo, invece, nel corpo della struttura una semplice istruzione di attesa di 1ms, si riduce drasticamente l'uso del processore.
Il sorgente definitivo è il seguente: CONTA.C
#include <stdio.h>
#include <wiringPi.h>
#define BTN_PIN 3 // Pulsante (3 WiringPi, GPIO22, pin 15)
#define T_DEBOUNCE 25 // Tempo di attesa per il termine del rimbalzo del pulsante
unsigned int n; // Numero di pressioni del pulsante
int main (void)
{
// --- Init
wiringPiSetup();
pinMode (BTN_PIN, INPUT); // configura BTN_PIN come pin di ingreso
// --- Loop
while (1)
{
if (digitalRead (BTN_PIN) == HIGH) // se il pulsante viene premuto
{
delay(T_DEBOUNCE); // aspetta esaurirsi rimbalzo
if (digitalRead (BTN_PIN) == HIGH) // rimbalzo terminato
n++; // incrementa di 1 il numero di pressioni
while (digitalRead(BTN_PIN) == HIGH) // aspetta rilascio pulsante
{
delay(1); // riduce utilizzo CPU (limita a 1000 iterazioni/s)
}
}
printf ("\r%d", n);
fflush(stdout);
}
return 0 ;
}
|
|
|